I am currently working as Autonomy Engineer at Caterpillar, where I develop planning algorithms for heavy construction & mining machineries. I work at the intersection of Motion Planning, Controls and Machine Learning solving problems in engineering and research in robotic navigation be it for mobile, legged or manipulator systems. In my previous work experience, I was involved in the development of multi-zone cleaning & AutoMode features for autonomous vacuum cleaners. I was involved through the stages of design, implementation, testing & deployment of the features.
I graduated in May 2021 with a Masters Degree in Robotics Engineering from Worcester Polytechnic Institute. At WPI, I was advised by Prof. Jing Xiao for extending genetic algorithm based motion planning framework RAMP for social robot navigation by integrating the Social Force Model into cost function optimization using Reinforcement Learning.
Prior to my graduate studies, I spent a year as a Visiting Research Scholar in Biorobotics Lab at Carnegie Mellon University working under the guidance of LTC Steve Crews , Dr. Matthew Travers and Prof. Howie Choset .
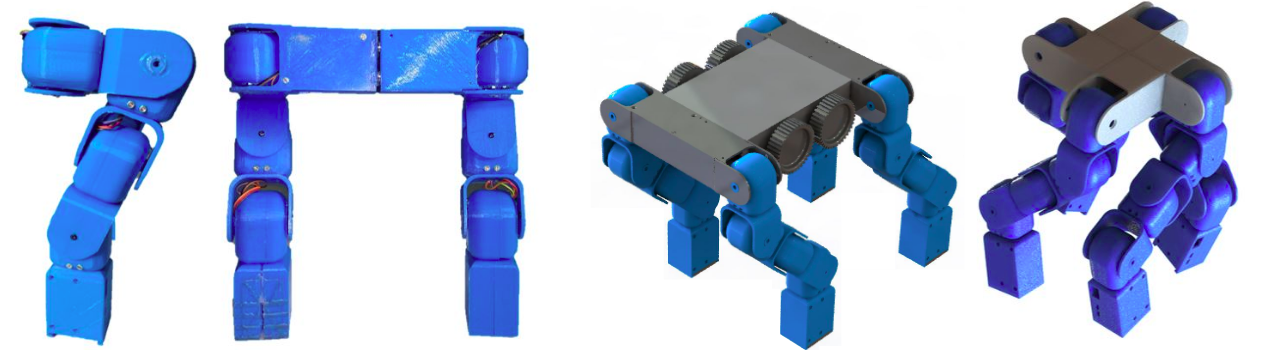
My Undergraduate Thesis with Dr. Shital Chiddarwar (VNIT Nagpur) involved development of Multi-Snake Modular Robot system to obtain legged robot traverse capability from combination of snake robots. In addition to work, I also mentor a group of students at IvLabs , where I conduct tutorials and mentor projects on Motion Planning and Controls for Underactuated Robotics Systems.
For any queries, please feel free to reach out to me at ssagrawal@wpi.edu .
I graduated in May 2021 with a Masters Degree in Robotics Engineering from Worcester Polytechnic Institute. At WPI, I was advised by Prof. Jing Xiao for extending genetic algorithm based motion planning framework RAMP for social robot navigation by integrating the Social Force Model into cost function optimization using Reinforcement Learning.
Prior to my graduate studies, I spent a year as a Visiting Research Scholar in Biorobotics Lab at Carnegie Mellon University working under the guidance of LTC Steve Crews , Dr. Matthew Travers and Prof. Howie Choset .
My Undergraduate Thesis with Dr. Shital Chiddarwar (VNIT Nagpur) involved development of Multi-Snake Modular Robot system to obtain legged robot traverse capability from combination of snake robots. In addition to work, I also mentor a group of students at IvLabs , where I conduct tutorials and mentor projects on Motion Planning and Controls for Underactuated Robotics Systems.
For any queries, please feel free to reach out to me at ssagrawal@wpi.edu .
Topics of Interest
Controls: Trajectory Optimization, Model Predictive Control, Optimal Control, System kinematics and dynamics
Planning: Sampling based Planning Algorithms, Motion Planning, Route Planning, Trajectory Optimization, Data-driven and Model based combined Planning
Machine Learning: Seq2Seq Prediction, Generative Models (GANs), Reinforcement Learning(RL), Imitation Learning (Inverse RL)
Controls: Trajectory Optimization, Model Predictive Control, Optimal Control, System kinematics and dynamics
Planning: Sampling based Planning Algorithms, Motion Planning, Route Planning, Trajectory Optimization, Data-driven and Model based combined Planning
Machine Learning: Seq2Seq Prediction, Generative Models (GANs), Reinforcement Learning(RL), Imitation Learning (Inverse RL)
Experience
San Francisco, CA (Dec 2022 - Present)
Platform Team:
Responsible for R & D of scalable and modular planning systems for mining & construction heavy machinery. Developed Motion Planning Evaluation Framework for quantifying planner performance under various scenarios using new metrics. Developing Graph Search Suite to support 793F haul truck and other autonomy applications requiring search based planning methods.
Application Team: Responsible for implementing planning stack for Autonomous CTL Undercarriage Endurance Test. Autonomous machine running 16 hrs per workday in loop through concrete, metal strips, gravel, etc enabled in-house customer to study machine wear and tear to improve machine quality, reduce warranty claims and validate new and existing supplier claims.
Research: Developing framework for scalable cost-function learning using Inverse Reinforcement Learning for generating operator-like navigation plans.
Application Team: Responsible for implementing planning stack for Autonomous CTL Undercarriage Endurance Test. Autonomous machine running 16 hrs per workday in loop through concrete, metal strips, gravel, etc enabled in-house customer to study machine wear and tear to improve machine quality, reduce warranty claims and validate new and existing supplier claims.
Research: Developing framework for scalable cost-function learning using Inverse Reinforcement Learning for generating operator-like navigation plans.
 Robotics Software Engineer Managed by
Mr. Sarath Suvarna
Robotics Software Engineer Managed by
Mr. Sarath Suvarna
San Jose, CA (June 2021 - Nov 2022)

Features Team: Responsible for improving the robot navigation for multi-zone cleaning feature.
Navigation Team: Responsible for resolving any navigation failures due to bad path planning. Added visualization features & improved simulator to aid debugging planning/mapping issues. Implemented an incremental search algorithm for avoiding dynamic obstacles in the environment. I contributed to the team in improving navigation stack to achieve 98.6% autonomy between docking & undocking.
 Robotics Research Intern Supervised by
Dr. Soshi Iba
Robotics Research Intern Supervised by
Dr. Soshi Iba
San Jose, CA (Jan 2021 - May 2021)
Intention Estimation for robot teleoperation:
Given the sequence on robot motion during teleoperation, the task is to estimate the teleoperator's intended task and provide assistance in executing the task. To solve the problem, I developed an Inverse Reinforcement Learning based probablistic method that estimates the intended tasks of the teleoperator in shared autonomy and evaluated the proposed algorithm in custom proof-of-concept gym enviornment.